Simulation
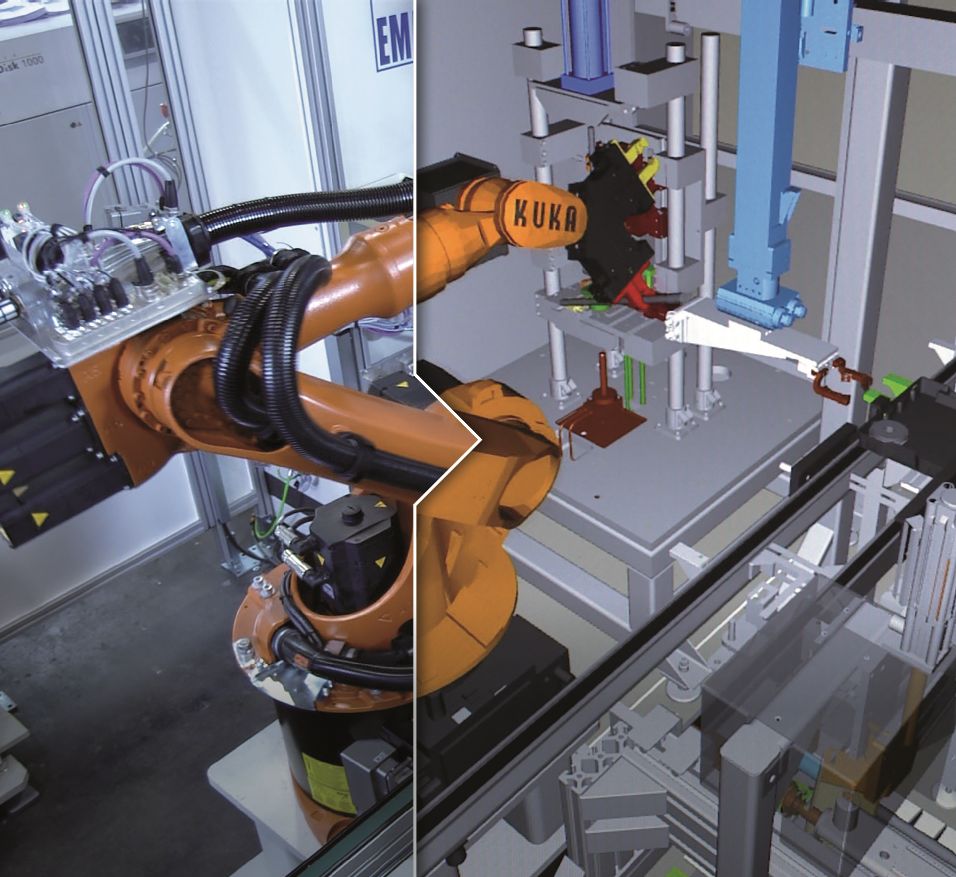
Simulation kompletter Automatisierungslösungen in drei Dimensionen
Klassische Industrieroboter bewegen sich im allgemeinen in einem -mathematisch gesehen- sechs-dimensionalen Raum. Zusätzlich zu unseren drei bekannten kartesichen Raumrichtungen müssen somit mindestens noch Kippung, Neigung und Drehung berücksichtigt werden.
Und selbst hiermit wurden noch nicht noch nicht alle Freiheitsgrade einer Sechachs-Kinematik berücksichtigt (Stichwort: "Status" und "Turn" bei Kuka oder auch "Quaternionen" bei ABB)
Bei den meisten Roboterkinematiken sind mathematisch und konstruktiv auch Raumpunkte möglich, die zu Singularitäten führen. Diese singulären Achsstellungen sind dadurch gekennzeichnet, dass zwei nicht gekoppelte Achsen des Roboters kollinear zueinender sind und somit eine auszuführende Bewegung unter Umständen nicht eindeutig im Achsraum durchgeführt werden kann.
Ziel sollte immer sein, diese Singularitäten zu vermeiden.

Erreichbarkeitsanalyse
Kommt der Roboter da hin?In einem ersten Schritt sollte bereits in der Planungphase die Auswahl und Positionierung eines Industrieroboters anhand eines virtuellen Modells überprüft werden.
Ziel ist es, den hohen Aufwand (sowohl finanziell wie auch zeitlich) eines späteren mechanischen Umbaus zu verhindern, falls sich während der Inbetriebnahme herausstellen sollte, dass mit den mechanischen Gegebenheiten (Zellenlayout und Greiferdesign) bestimmte erforderliche Zielkoordination nicht erreichbar sind.
Mit unseren 3D-Simulationssoftware haben wir die Möglichkeit, Sie bei der Validierung Ihres Zellenlayouts bereits in der Planungsphase zu unterstützen.
3D-Simulation
Kommt der Roboter da hin und wieder weg und wie schnell?Wir streben an, Sie bereits bei der Planung Ihrer Anwendungen vollumfänglich zu unterstützen.
Die Komplexität moderner Automatisierungszellen wächst immer mehr an. Besonders bei solch komplexen Lösungen ist eine vorherige Simulation sinnvoll oder gar unumgänglich.
Als Resultat können im einfachsten Fall die bereits bestehenden Konstruktionsdaten bestätigt werden oder auch die CAD-Daten der kompletten Zelle oder auch nur der Greifermechanik nochmal "über den Haufen geworfen" werden.
Neben der reinen Erreichbarkeit in einer Automatisierungszelle wird auch die komplette Bahnplanung mit realen Maschinendaten eines Industrieroboters in der virtuellen Welt simuliert. Resultierend gibt es in der realen Welt keine böse Überraschung mehr (z.B. "Singulatität" oder auch "im CAD hat's gepasst")
Ziel ist in jedem Fall die vollständige konstruktive Auslegung der Automatisierungszelle vor Beauftragung/ Bestellung und mechanischem Aufbau zu überprüfen.
Wir zeigen Ihnen auch, mit welcher Zykluszeit Sie unter realistischen Bedingungen rechnen dürfen.
Als Werkzeuge hierfür nutzen wir die Kopplung per Netzwerk der virtuellen Robotersteurung (egal ob KRC2, KRC4 oder auch KRC5) mit unserer resourceschonenden 3D-Simulationssoftware.
Für einen ersten schnellen Überblick können wir für Sie eine Videodatei erstellen, in der Sie einen Komplettablauf Ihrer Roboterzelle vorab sehen können.
Eine detaillierte Analyse des genauen Ablaufs können Sie auch selstständig mit unserer komplett lizenzfreien 3D-Simulationssoftware (Click'n'Start) auf Ihrem lokalen Rechner durchführen.
Je nach Kundenwunsch können wir Ihnen als Resultat auch ein komplettes Offlineprogramm erstellen, welches direkt in einer realen Roboteruerung eingesetzt werden kann.

Virtuelle Inbetriebnahme
Digitaler Zwilling trifft RealitätMit der konsequenten Digitalisierung und der Erstellung eines digitalen Zwillings unterstützen wir Sie, damit sich Risiken bei der Planung verringern, Sie Ihre Anlagen schneller in Betrieb nehmen können und Sie Prozesse auch während des laufenden Betriebes optimieren können.
Mit unseren Partnern haben wir hierfür Lösungen und softwareübergreifende Schnittstellen sowie Technologien entwickelt, mit denen die Planungssimulation näher an die Realität gerückt wird.
Die komplette Produktionsanlage kann somit schon im Vorfeld vollständig erstellt und unter verschiedenen Randbedingungen angepasst werden.
Das bedeutet, Sie können bereits in der Projektierungsphase sämtliche Aktorik und Sensorik vollumfänglich in Betrieb nehmen und auf dem Bildschirm deren komplette Funktinalitäten beobachten; lange bevor die erforderlichen Hardwarekomponenten aufgebaut werden.
Wir helfen Ihnen, die erforderlichen Arbeitsabläufe zu simulieren und zu optimieren sowie Alternativen hierzu zu entwickeln.
Doch keine Simulation?
Wenn auch nicht ganz Ernst gemeint... in jedem Scherz liegt auch etwas Wahrheit |
 |
 |
 |
 |
 |